Tracks Mobility Module
Tracks Mobility Module
The tracks module is the most concrete public firmware slice of Keero Bot today.
It is the part of the project that already bridges firmware, mechanics, wiring, and a clear mobility use case.
Why It Matters
This module is important because it shows that Keero Bot is not only a mainboard concept.
It already has a real path toward:
- movement
- embodied AI experiments
- demoable physical interaction
- repeatable module-level iteration
Attribution and Project Lineage
The mobility concept is inspired by the ESP-SparkBot direction.
Because of that, Keero keeps the mechanical references and public credits visible instead of pretending the module started from a blank page. The Keero contribution is the adaptation, firmware work, platform integration direction, and the updated controller approach.
What Is Keero-Specific
The current Keero tracks implementation is centered around:
- Keero-authored open-source firmware
- an updated module PCB direction using
ESP32-C3-WROOM-M2 - Arduino and PlatformIO compatibility
- integration thinking that fits the broader Keero modular platform
In practice, that means:
- the mobility idea acknowledges its inspiration
- the working firmware and adaptation path are clearly Keero work
Firmware Scope
The public tracks firmware already demonstrates several real subsystems:
- motion control
- lighting control
- battery and power monitoring
- serial command parsing for testing and control
That is enough to present the module as active engineering work rather than a placeholder.
Reference Bill of Materials
The tracks module is documented here with practical reference parts that were used during bring-up and mobility testing.
This is not presented as a locked production BOM. It is a public reference set for developers who want to understand the module stack and mechanical direction.
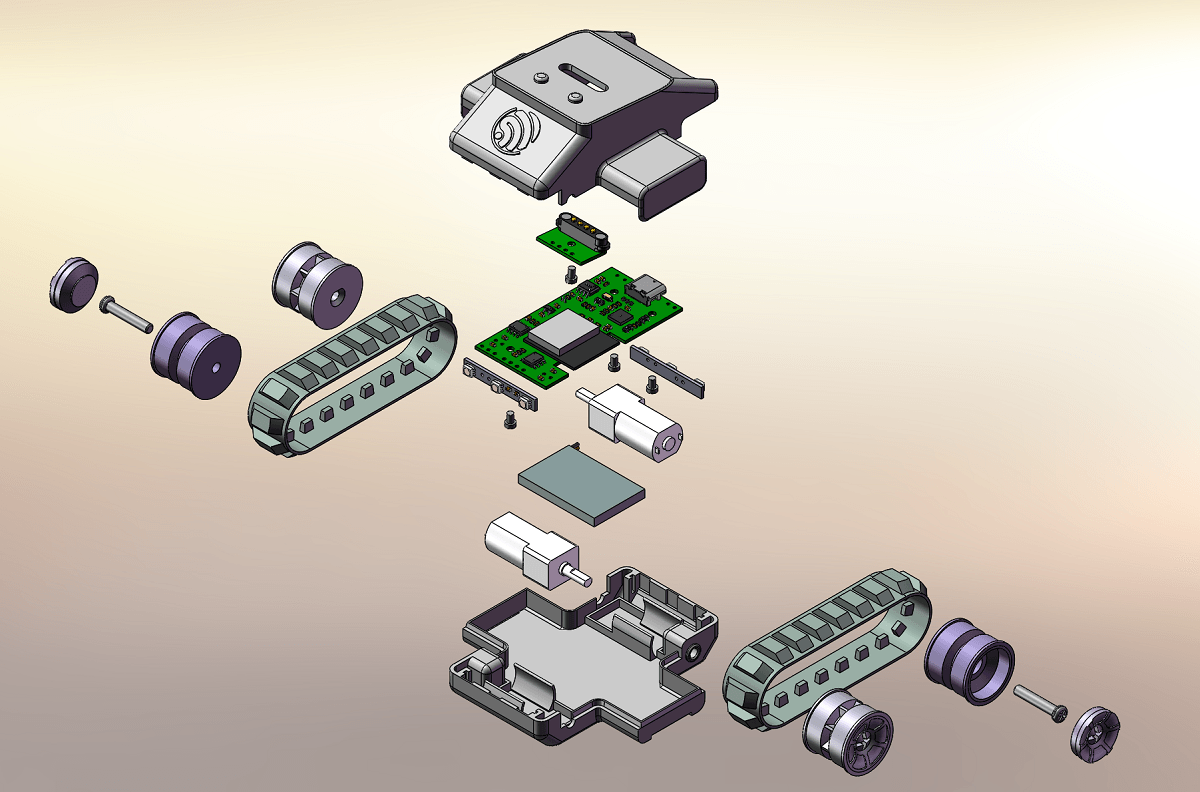
Core mobility platform
- tracked chassis reference: AliExpress reference link
- pogo interconnect, 4-pin: AliExpress reference link
- DC motors, 3V, quantity
2: AliExpress reference link
Integration Notes
At a public level, the mobility module should currently be understood like this:
- the mechanics follow the SparkBot-inspired tracked format
- the Keero PCB/controller direction was updated around
ESP32-C3-WROOM-M2 - the module now fits an Arduino and PlatformIO workflow more naturally
- the pogo connector provides a compact path for docking or module-to-mainboard connection
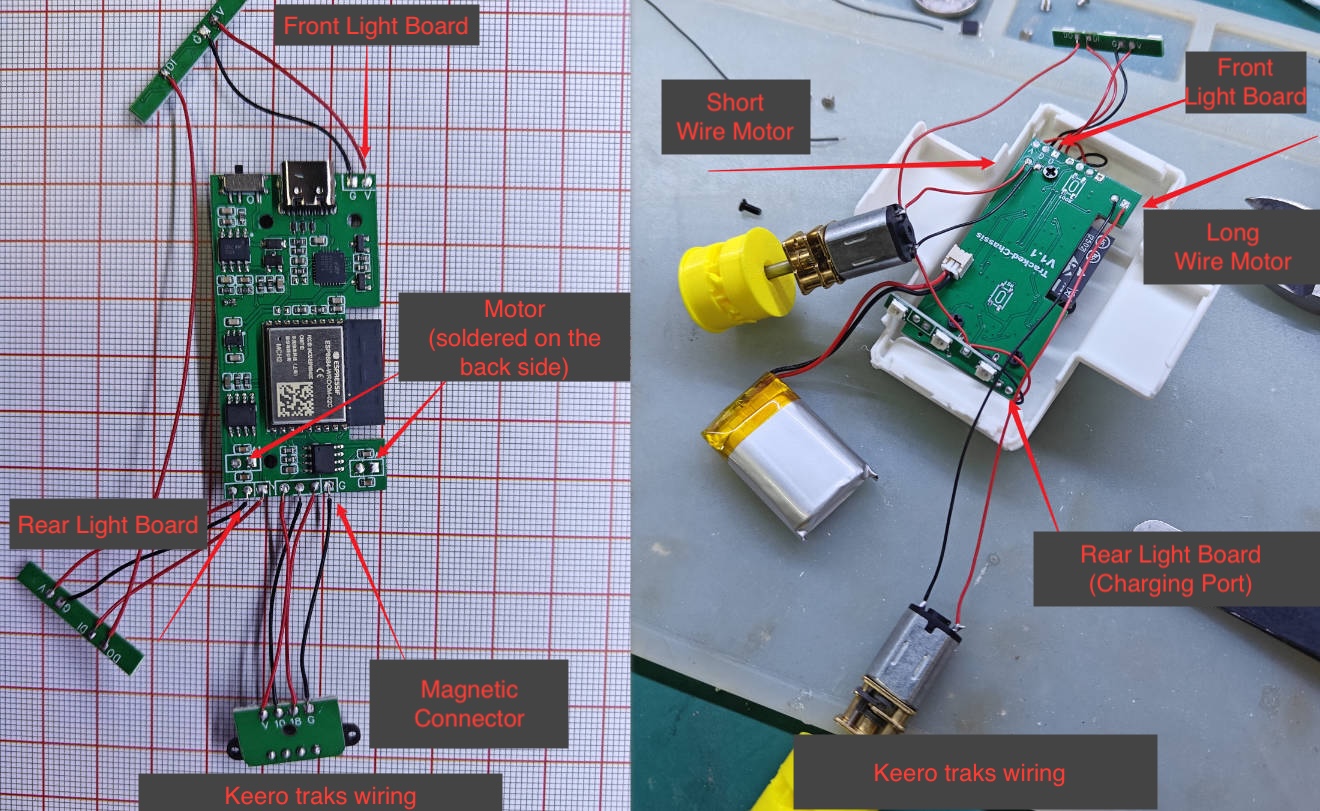
Prototyping Context
The tracks module also reflects the practical prototyping side of Keero Bot.
Its mobility direction, controller adaptation, and public hardware documentation were developed through repeated fabrication, testing, and iteration rather than a single static build.
Visual References
Open Mechanical Reference Files
The mobility mechanics are intentionally shared here together with attribution context, since this part of the module direction is openly acknowledged as inspired by the original SparkBot approach.
Downloads
- Tracks body top STL
- Tracks body bottom STL
- Tracks driver wheel STL
- Tracks idle wheel STL
- Tracks idle wheel cover STL
Public Positioning
For open documentation purposes, this module is a good example of the Keero release model:
- firmware is public
- module mechanics can be shared when attribution and origin matter
- platform-level production details still stay more selective