System Architecture
System Architecture
Keero Bot is easiest to understand as a small set of clear system blocks instead of one big “smart board” idea. That makes it easier to explain what already exists, what is still in progress, and how future modules fit in.
Block-Level View
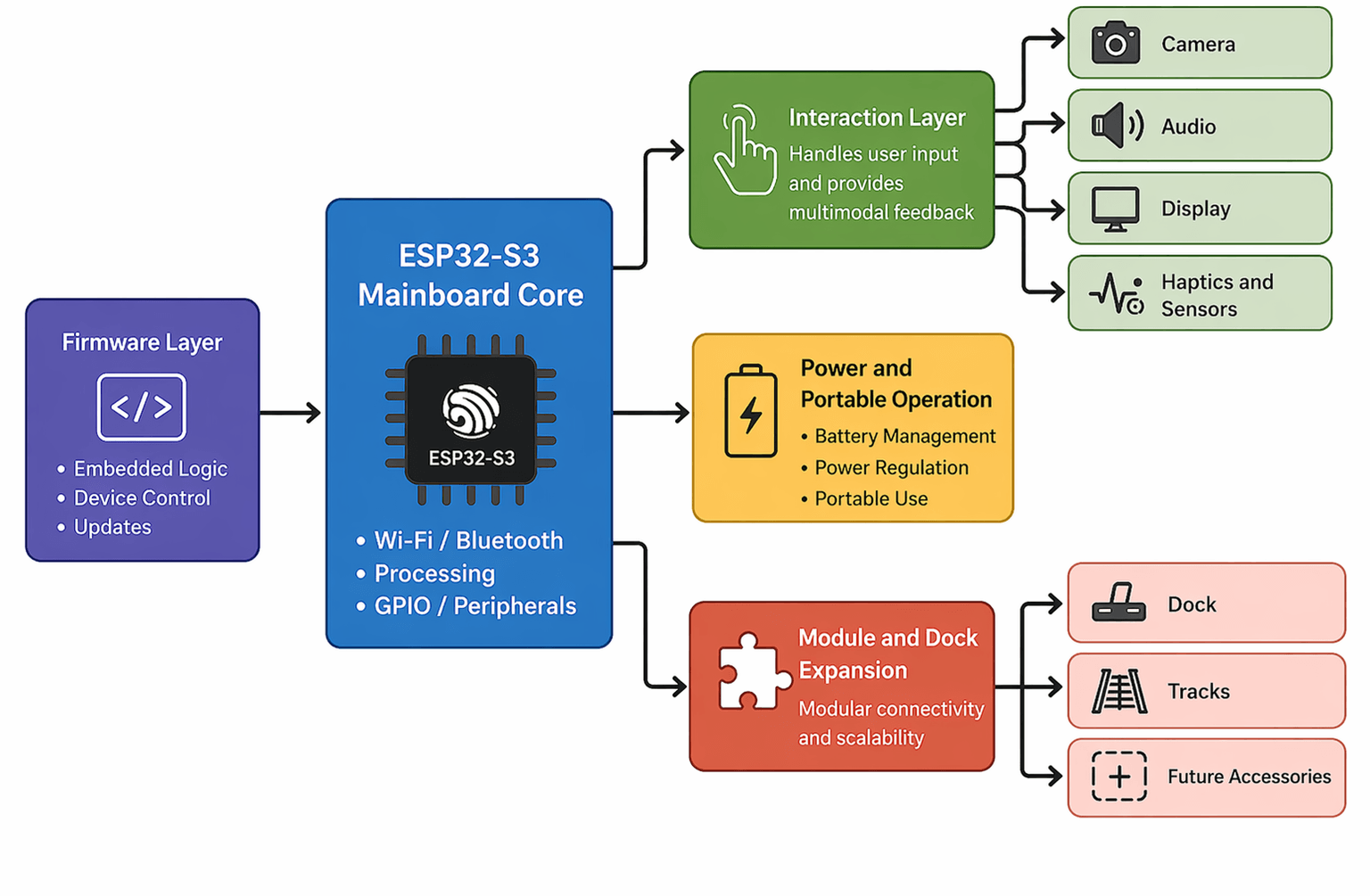
This is the simplest public way to read the project: one mainboard core, one firmware layer, one interaction stack, one power story, and one modular expansion path.
1. Mainboard Core
The mainboard is the central hardware layer of the platform. It brings together compute, power management, sensing, wired interfaces, and module connectivity in one reusable core.
From a system perspective, the mainboard is responsible for:
- hosting the ESP32-S3 compute core
- coordinating local peripherals
- managing power across the device
- exposing interfaces to external modules
This matters because Keero needs one stable center that can survive across multiple enclosure, dock, and mobility concepts.
2. Interaction Layer
Keero Bot is designed around real-world interaction rather than pure compute.
The public hardware story includes support for:
- camera-based perception
- microphone and speaker paths
- haptic feedback
- user input and motion sensing
- display output for local feedback
Together, these pieces make the project feel closer to an interactive device than to a conventional development board.
3. Power and Mobility Layer
The system is intended for portable and dockable use cases. Publicly, that means the architecture includes:
- battery-powered operation
- managed charging behavior
- dock-oriented connectivity
- support for mobility-oriented modules such as tracks
The detailed rail implementation stays private, but the public system design clearly communicates that power was treated as a first-class part of the platform.
That matters because portable hardware needs real operating modes, not only a USB-on-the-bench story.
4. Modular Expansion Layer
Modularity is one of the defining parts of Keero Bot.
The platform is designed so that:
- the mainboard remains the reusable brain
- external modules add form factor or capability changes
- pogo contacts and board-level expansion interfaces support iteration without redesigning the full system
This is especially important for future docking, mobility, and accessory experiments.
5. Firmware Layer
Firmware is the orchestration layer that turns the board into a coherent product platform.
Its long-term role is to:
- initialize and coordinate hardware subsystems
- manage interaction behavior
- support module-specific functionality
- provide the bridge to AI logic and connected services
Public docs keep firmware more open than hardware production data, which supports community understanding without exposing the full manufacturing recipe.
Architecture At A Glance
If Keero Bot is read as a layered system, the stack is:
- mainboard hardware core
- interaction peripherals
- portable and docked power behavior
- modular accessories and attachments
- firmware orchestration
That structure is simple enough to explain quickly and rich enough to support future demos, iterations, and module work.
Public Disclosure Boundary
This architecture page is intentionally high level.
It explains:
- what the system does
- how the major blocks relate
- why the design direction makes sense
It intentionally avoids:
- exact PCB implementation details
- low-level signal maps for replication
- full manufacturing or sourcing instructions