Introduction
Keero Bot
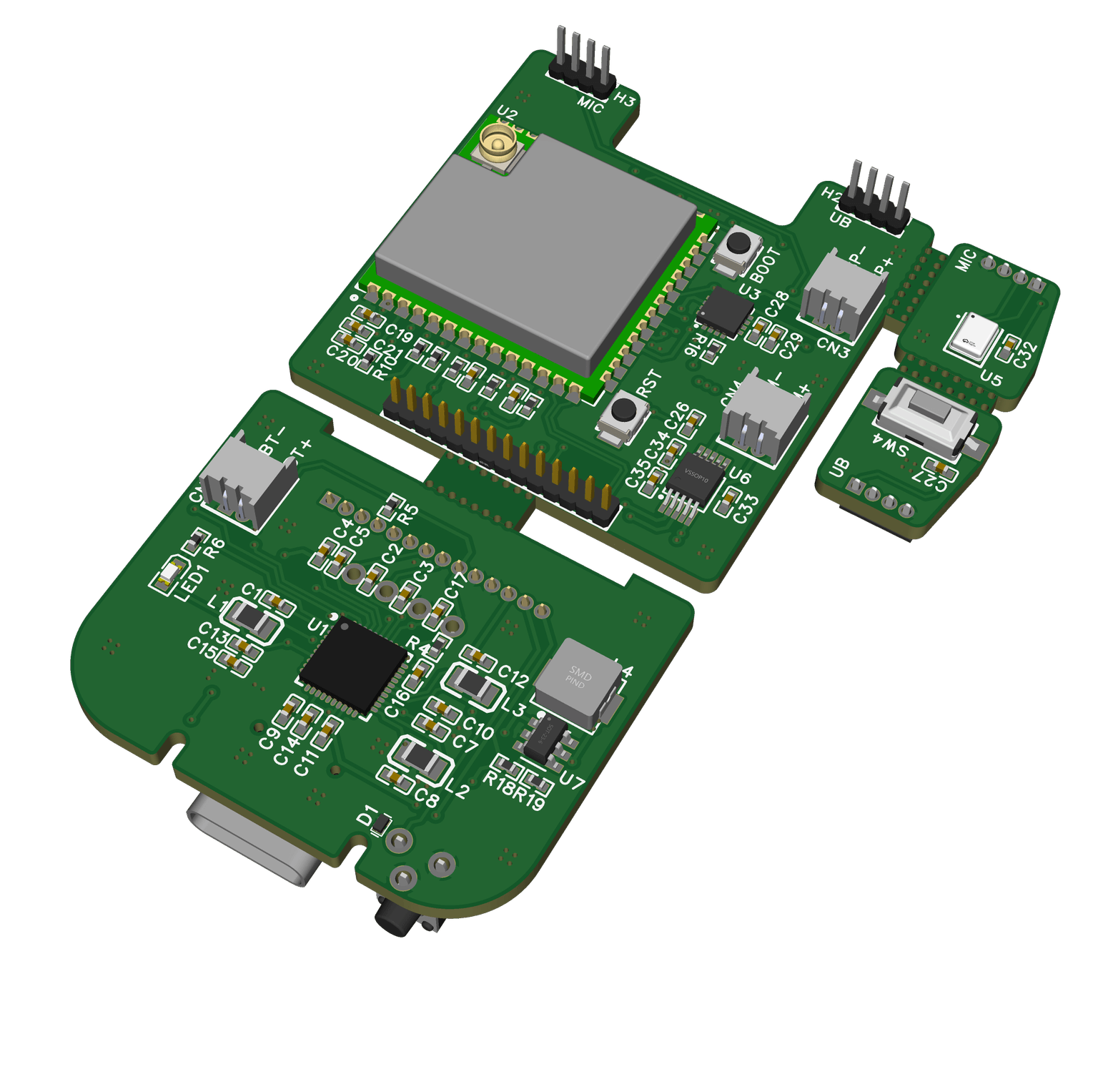
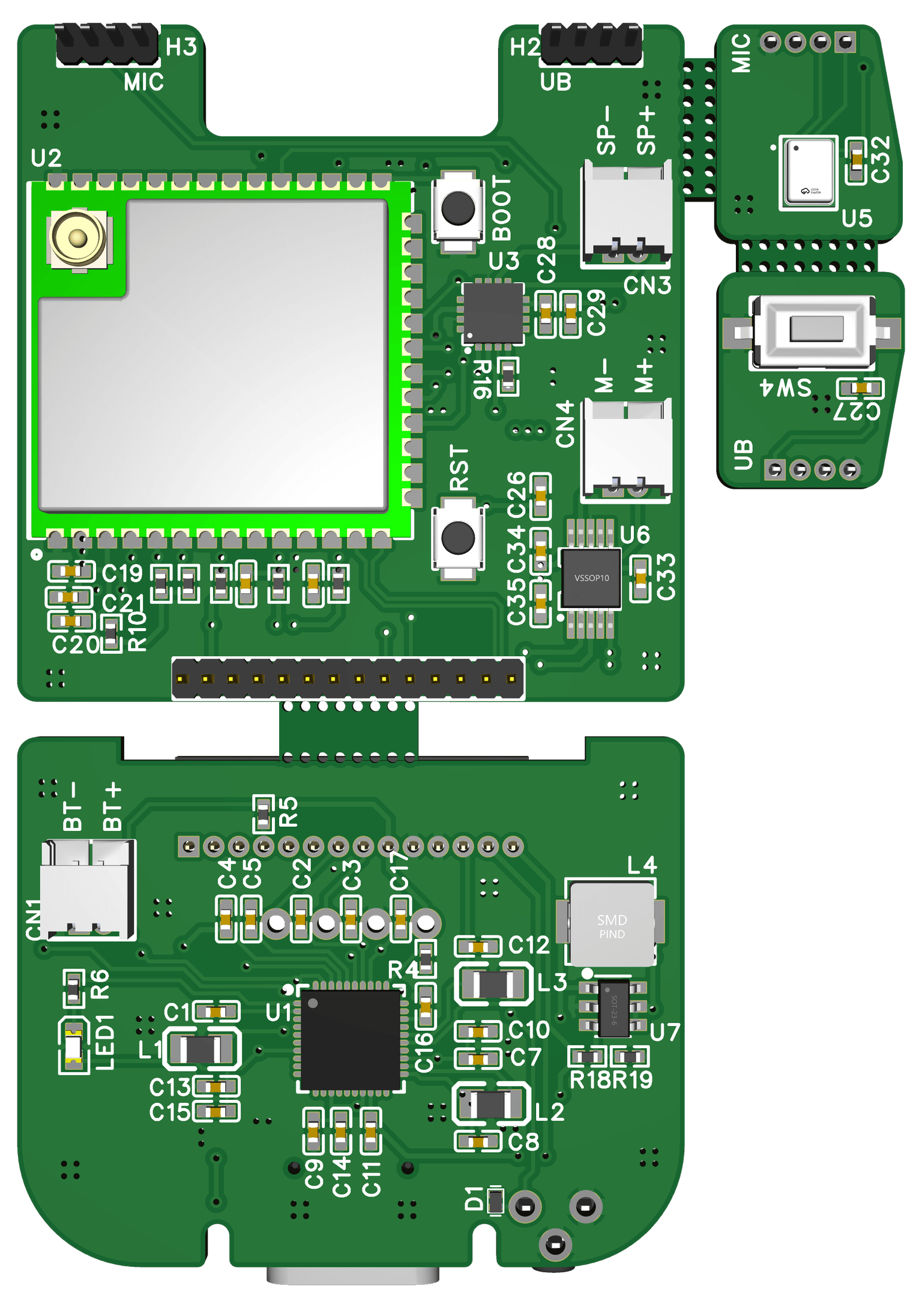
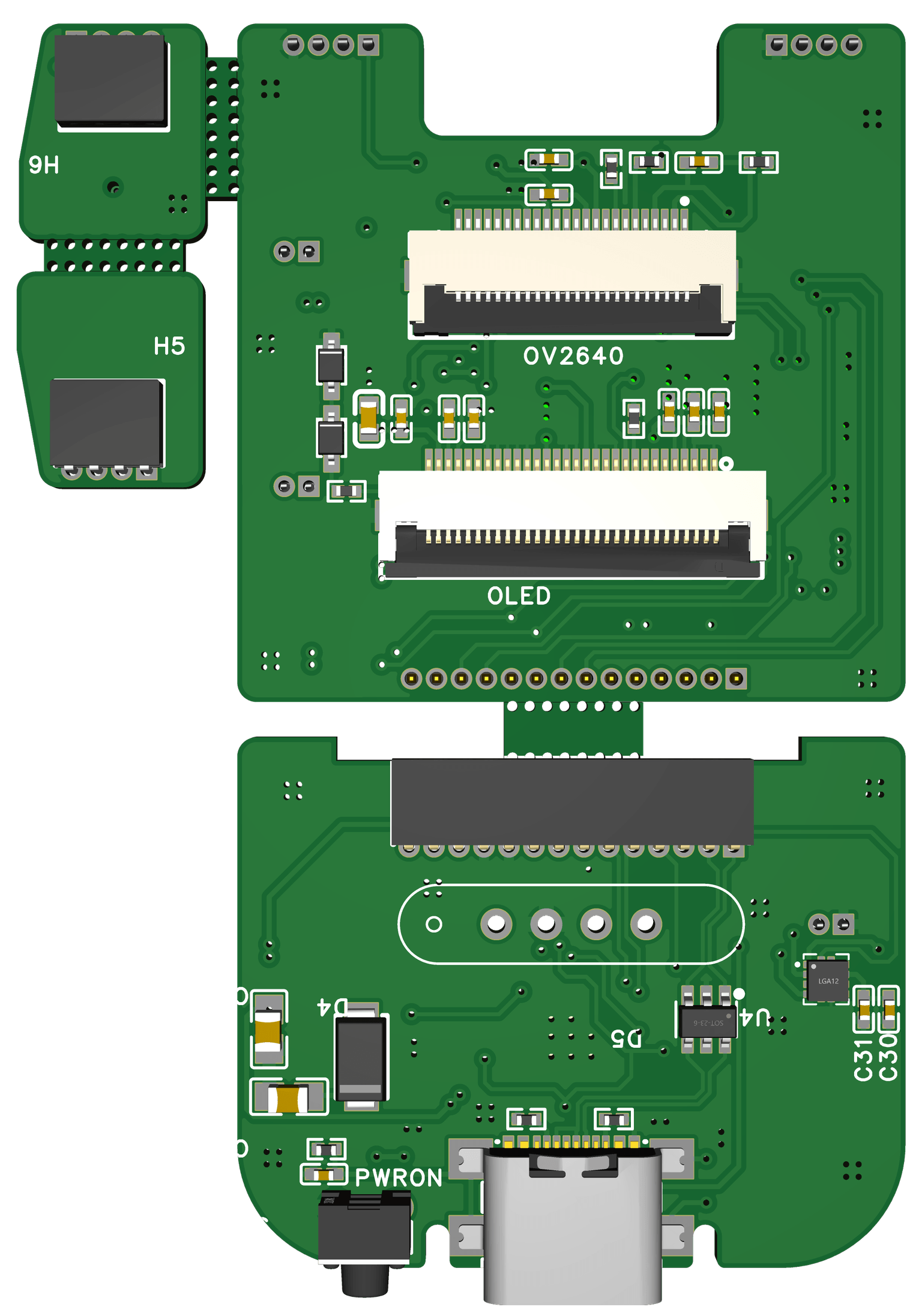
Keero Bot is an early modular hardware project for building interactive AI devices. At the center is a compact ESP32-S3 based mainboard designed to bring together audio, sensing, haptics, display support, camera connector paths, and module expansion in one place.
The goal is not to make a generic GPIO-heavy development board. The goal is to create a reusable hardware base that can grow into a more complete device through firmware, modules, and enclosure work.
Why Keero Exists
Keero started because I could not find the kind of board I actually wanted to build on.
I did not want another generic dev board. I wanted something small, modular, and much closer to a real device architecture.
Boards like the XIAO ESP32 series are great in many ways, but they still involve tradeoffs when the goal is a more complete battery-powered product. Once you care about better power management, battery state awareness, charging behavior, and a cleaner system design, many small boards start to feel like partial solutions.
I also liked the modular direction of projects like SparkBot, but I did not want to keep the same firmware approach or hardware choices. I wanted something that felt more refined, more flexible as a platform, and more aligned with the kind of device I actually wanted to make.
Then I found Byte90 and was genuinely impressed by its firmware direction. That helped clarify the software side for me. I started thinking about a system that could combine:
- a proper ESP32-S3 core
- PMIC-based power management
- interaction hardware such as audio, haptics, sensing, and display support
- modular add-ons
- a path toward a small expressive desktop companion
That is where Keero comes from.
The long-term goal is not to stop at a board. The goal is to turn this into a cute modular desktop pal with more personality, more interaction, and eventually more Tamagotchi-like behavior, while also learning from projects such as MimicLaw and WireClaw.
So the project sits somewhere between hardware platform and future device: serious enough to build on, but playful enough to become a character.
What The Project Is Trying To Become
Keero is meant to become a small but capable hardware platform for projects that need more than just compute. It is being shaped toward use cases where a device should be able to sense, respond, dock, move, and eventually live inside a polished enclosure.
In practical terms, that means:
- one compact reusable core board
- one shared firmware direction across revisions
- multiple physical extensions through modules
- public documentation that explains the system clearly
That is why the project is documented as a platform rather than as a one-off PCB.
What Exists Today
The current public version of Keero already shows:
- a real mainboard built around ESP32-S3
- a high-level documented hardware architecture
- public visual references, schematic previews, and board viewer
- tracks as the clearest active module direction
- a firmware section that is honest about what is implemented and what is still coming later
This matters because the docs should help people understand what is already real, not only what the project might become.
Platform Direction
Keero is being shaped around four simple ideas:
- one compact mainboard that carries the essential system functions
- optional modules that change how the device is used physically
- open firmware and open architecture discussion
- a protected boundary around production-ready hardware details
Platform Capabilities
At a public level, the current platform already points toward:
- camera connector support
- microphone and speaker workflows
- local feedback through display and haptics
- motion-aware interaction through sensors
- battery-capable operation
- dock and module expansion
Together, these make Keero feel closer to a real device platform than to a generic breakout board.
What This Documentation Covers
This public documentation is focused on:
- project overview and design intent
- subsystem architecture
- modular expansion strategy
- current hardware scope
- firmware status and roadmap
It does not publish the full manufacturing package, editable board sources, or other production-critical implementation files.
Intended Audience
This site is written for:
- makers evaluating the project direction
- embedded developers who want architectural visibility
- open hardware followers who are curious about the system design
- future collaborators working on firmware, modules, or productization
Platform Summary
At a high level, the current Keero Bot platform includes:
- ESP32-S3 compute core
- managed battery and power subsystem
- camera and display support
- audio input and output
- haptic and motion sensing capabilities
- pogo-based modular expansion
Why The Public Version Is Selective
The public release is meant to be useful without becoming a cloning package.
That balance matters because the project should:
- stay understandable to the community
- remain understandable to developers
- keep firmware and architecture discussions open
- avoid exposing the full production recipe of the official hardware
This is especially important for a project that is still early and may go through several hardware revisions.
Why Follow The Project
People following Keero today can already see:
- a coherent hardware identity
- a documented modular direction
- a practical interaction stack
- clear signs of what is working now versus what is still being built
- documentation and firmware evolving alongside the board