Keero Bot Documentation
Keero is an early modular AI hardware project built around an ESP32-S3 mainboard. The goal is to grow it from a compact prototype platform into a more complete device with audio, sensing, display, haptics, camera support, and add-on modules such as dock and tracks.
This site is written as public project documentation, not as a manufacturing release. It explains what the platform is, how the main pieces fit together, what is already real, and what is still in progress.
What Keero Is
Mainboard First
Keero starts with a compact ESP32-S3 mainboard that brings compute, power, interaction hardware, and module connectivity into one reusable core.
Modular By Design
The mainboard is meant to work with add-ons such as dock and tracks, so the project can evolve without redesigning everything around a single static PCB.
Built For Interaction
The hardware direction already includes audio, haptics, motion sensing, display support, and camera connector paths, which makes the platform more than a generic dev board.
Open Where It Helps
Firmware and architecture are documented openly. Production-grade hardware release files stay private so the project can remain public without becoming trivial to clone.
Still Early
This is an active prototype project. Some parts are already real and testable, while other parts are documented as direction, not as finished product behavior.
Community Friendly
The docs are meant to help makers, embedded developers, and curious followers understand the project quickly without needing a full private hardware package.
Current Hardware Snapshot
Current Keero render assets mirrored from the hardware repository for deployment.
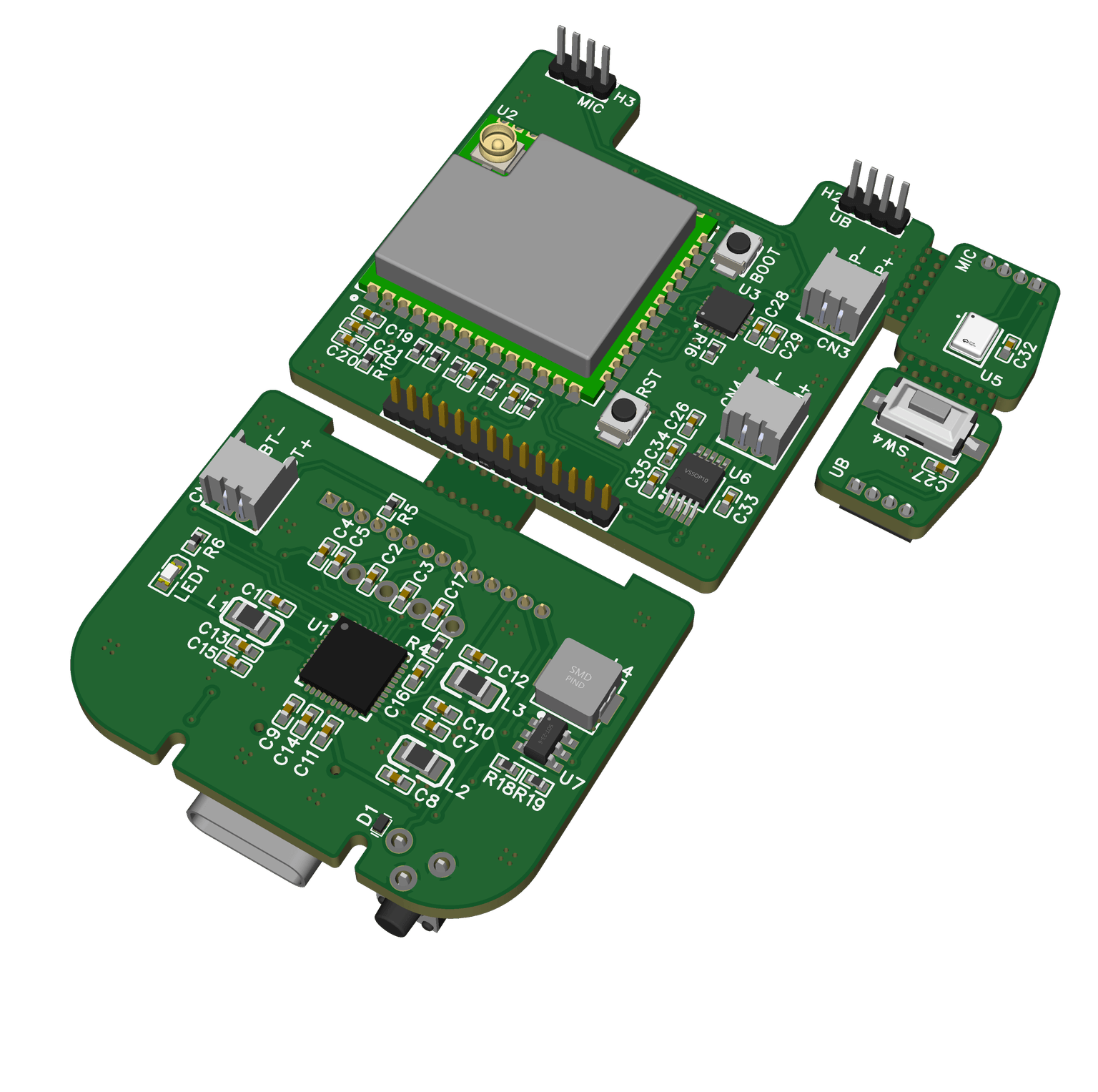
Current Platform Snapshot
ESP32-S3 Core
The platform is built around ESP32-S3-WROOM-1U-N16R8 as the central compute and connectivity module for firmware, peripherals, and module control.
Audio And Feedback
The current board direction includes microphone input, speaker output, haptic feedback, and local user feedback paths for more expressive prototypes.
Camera And Display Paths
Keero includes connector paths for camera and small display workflows. These are part of the board architecture, even when the final attached module or enclosure is still evolving.
Portable Power Direction
The project uses a battery-oriented power-management approach so the board can move beyond a USB-only lab setup and toward portable and docked use.
Dock And Mobility Ideas
The first visible module directions are dock and tracks, which help explain where the platform can grow next.
Firmware In Progress
Firmware is still early overall, but the tracks module already has real code and serves as the clearest example of how the platform can turn into a working device family.
What You Can Do Next
Read The Overview
Start with the overview pages if you want the short version of what Keero is trying to become.
Inspect The Hardware
Visit the hardware section for the mainboard role, module strategy, connector map, and the interactive board viewer.
Check Firmware Status
Use the firmware pages to see what is already implemented and what is still placeholder territory.